ATmega2560 (Bulk) 셋업
목표 : ATmega2560 보드에 개발 버전용 펌웨어를 설치한다.



설치 과정
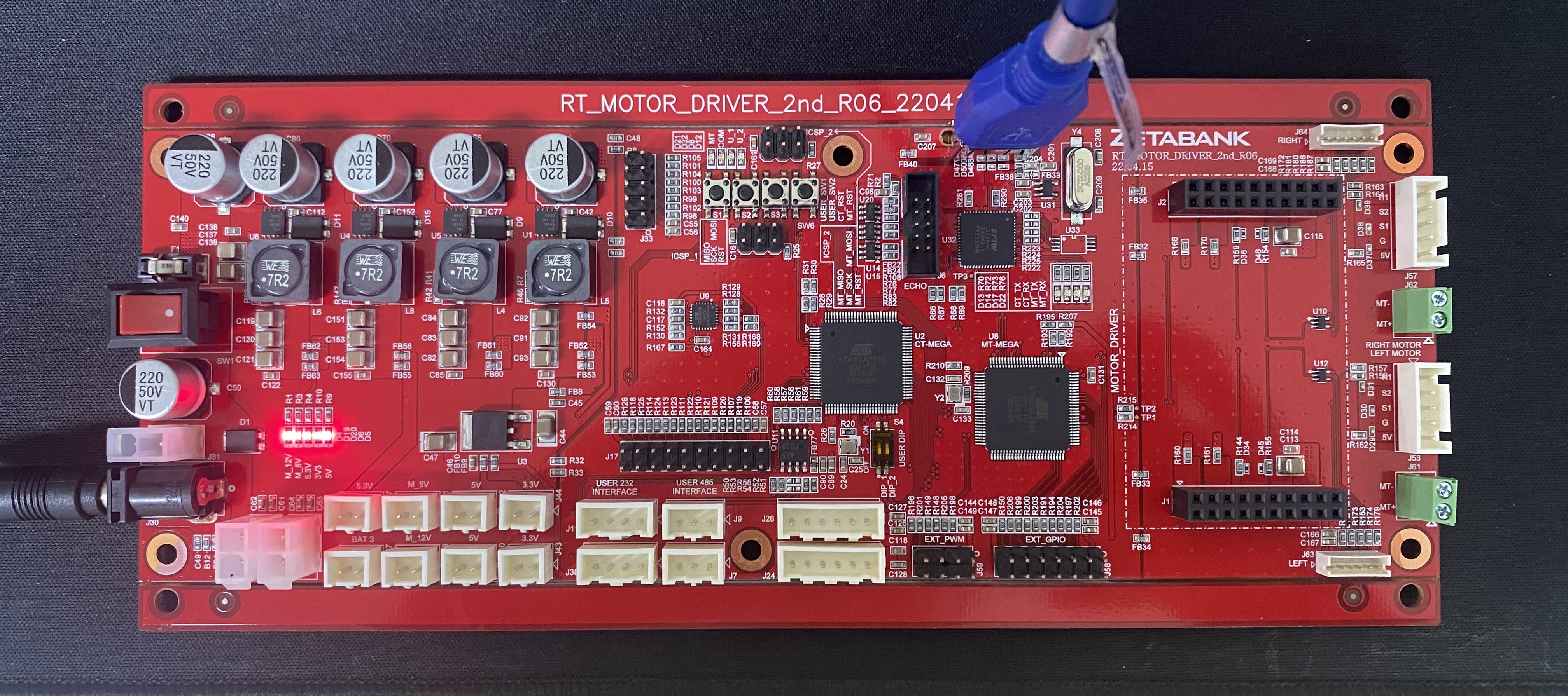
ATmega2560 보드에 충전 포트와 USB 포트를 연결한다.
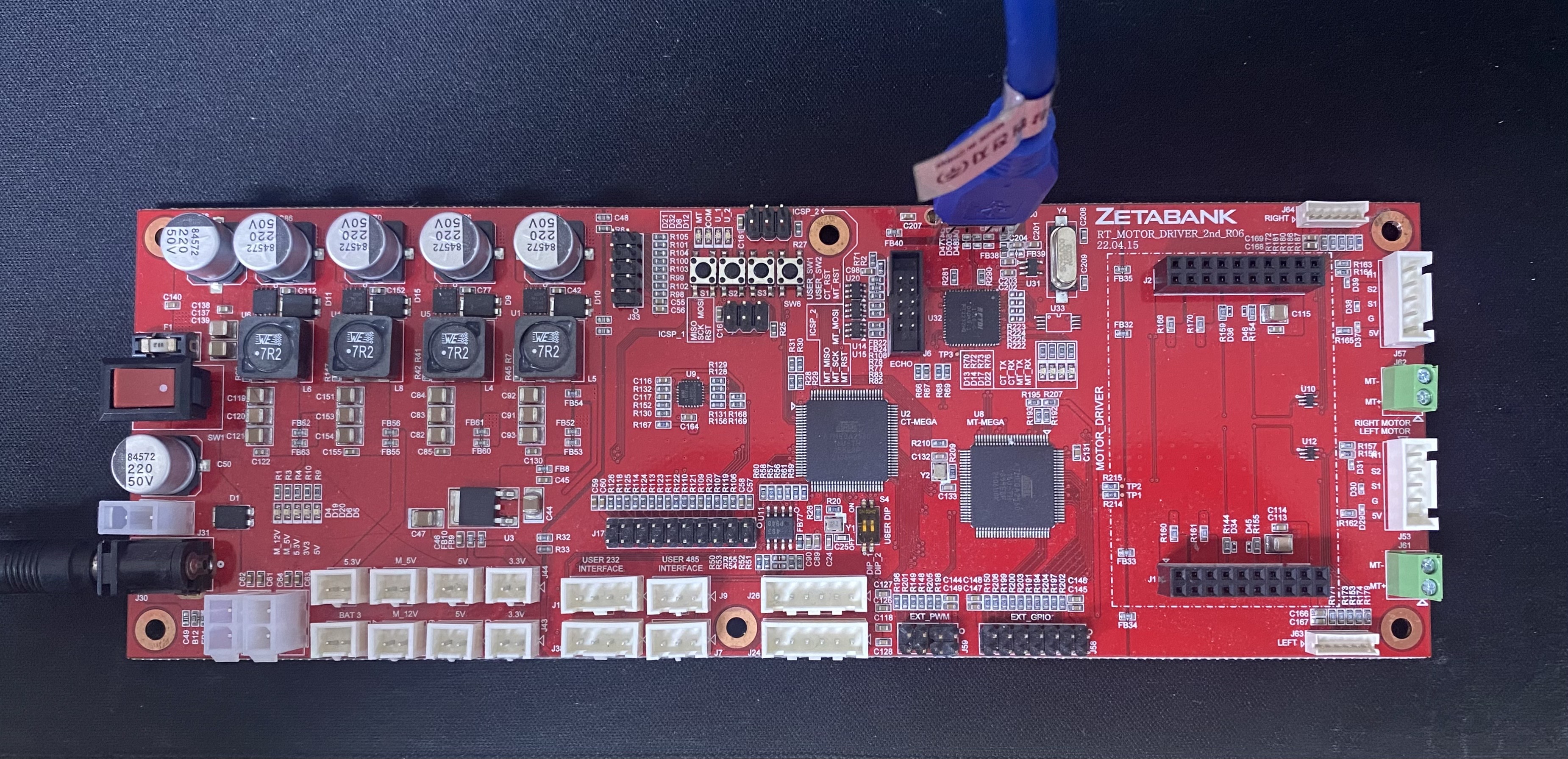
ATmega2560 보드의 전원을 킨다.
펌웨어 파일을 준비한다.
펌웨어 파일 준비 과정
3-1. GitHub에 접속한다. (주소: https://github.com/zetabank-devteam)

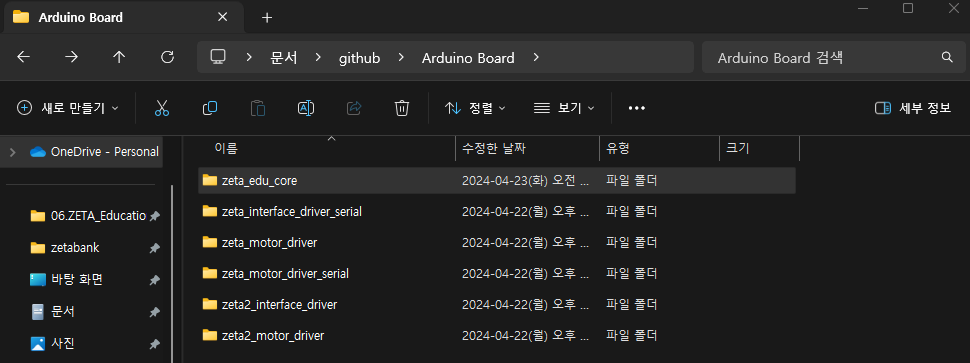
3-2. Repositories에서 zeta_edu_core 와 zeta_motor_driver 를 clone한다.
Clone 위치는
문서/github/Arduino Board와 같이 본인이 지정한다.
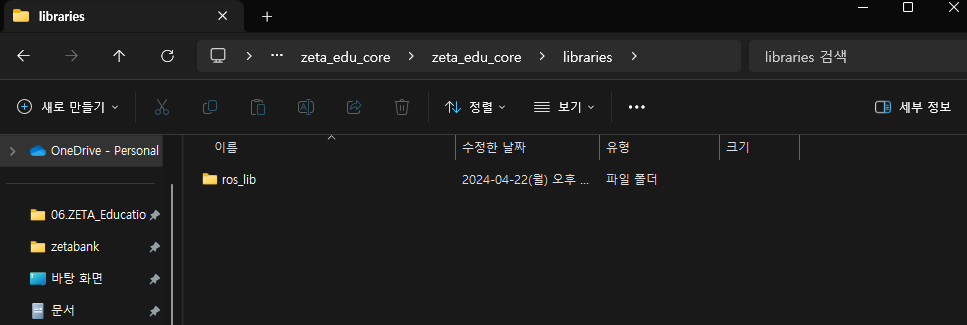
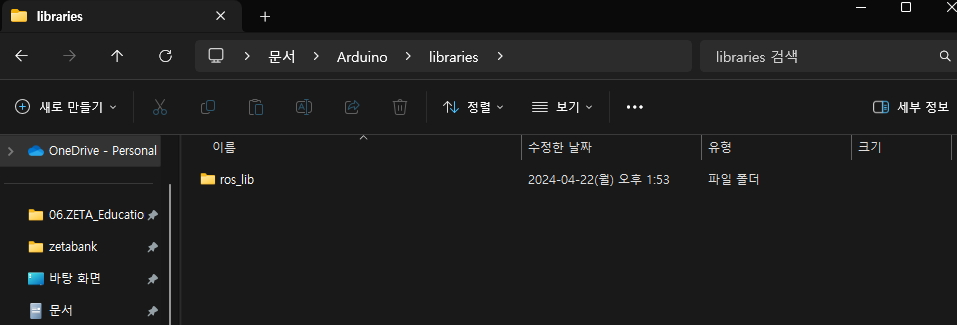
3-3. Clone이 끝난 뒤에는 Arduino 파일에 libraries 폴더를 만들어 ros_lib 폴더를 복사한다.
ros_lib 파일은
zeta_edu_core/zeta_edu_core/libraries/ros_lib위치에 존재한다.
|
|---|
Clone 파일의 ros_lib 파일
|
|
Arduino 파일에 복사된 ros_lib 파일
|
3-4. Arduino IDE 를 다운받는다. (주소: https://www.arduino.cc/en/software)

3-5. VSCode를 열어 확장에서 Arduino 를 설치한다.

3-6. 펌웨어 파일을 VSCode 에서 연다.
zeta_edu_core와 zeta_motor_driver를 각각 따로 열어주는 것을 추천한다.

펌웨어를 설치한다.
펌웨어 설치 과정
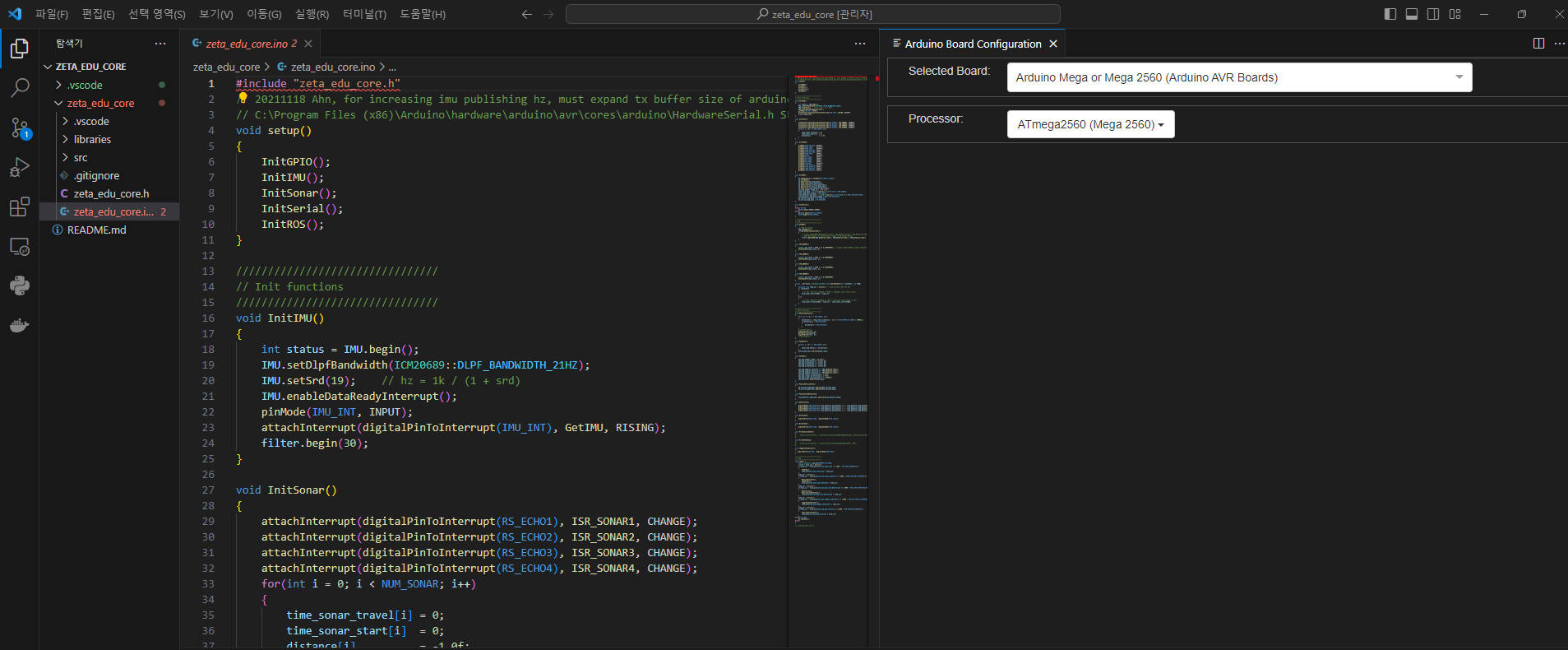
4-1. 우측 하단의 ‘Show Board Config’를 클릭 후 ‘Arduino Board Configuration’에서 2560을 입력하여 Arduino Mega or Mega 2560 을 선택한다.
4-2. 우측 하단의 ‘Select Serial Port’를 클릭 후 포트를 설정한다.
일반적으로 COM3 & 4 또는 COM7 & 8이 활성화된다.
zeta_edu_core는 낮은 숫자 로, zeta_motor_driver는 높은 숫자 로 설정한다.
|
|
|---|---|
zeta_edu_core의 port는 COM3
(reset 버튼 위치는 전원 포트에서 두번 째 먼 곳에 위치함)
|
zeta_motor_driver의 port는 COM4
(reset 버튼 위치는 전원 포트에서 제일 먼 곳에 위치함)
|


4-3. .ino 파일 을 선택 후 Arduino: Upload 를 실행한다.
[Done] 이라는 문구가 출력 터미널에 뜨면 문제없이 설치된 것이다.
|
|
|---|---|
zeta_edu_core upload done
|
zeta_motor_drivere upload done
|